



CP500L Robot

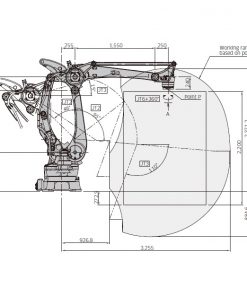
The CP series palletizing robots feature industry leading cycle times, a broad motion range, a space and energy saving controller, and easy-to-use palletizing software to program the robot’s operation. The CP500L palletizing robot has a maximum payload capacity of 500 kg, and it drives the flexible automation of end-of-line and distribution processes in a wide range of industries, as well as supports the highest production line efficiencies.
| CP500L SPECIFICATIONS | |||
| Type | Articulated Robot | ||
|---|---|---|---|
| Degrees of Freedom (axes) | 4 | ||
| Payload (kg) | 500 | ||
| Max. Reach (mm) | 3,255 | ||
| Positional Repeatability (mm) ✽1 | ±0.5 | ||
| Motion Range (°) | Arm Rotation (JT1) | ±160 | |
| Arm Out-in (JT2) | +95 – −46 | ||
| Arm Up-down (JT3) | +15 – −110 | ||
| Wrist Swivel (JT4) | ±360 | ||
| Wrist Bend (JT5) | – | ||
| Max. Speed (°/s) | Arm Rotation (JT1) | 85 | |
| Arm Out-in (JT2) | 80 | ||
| Arm Up-down (JT3) | 80 | ||
| Wrist Swivel (JT4) | 180 | ||
| Moment of inertia (kg•㎡) | 250 | ||
| Palletizing Capacity (cycle/hour) ✽2 | 1,000 | ||
| Mass (kg) | 1,650 | ||
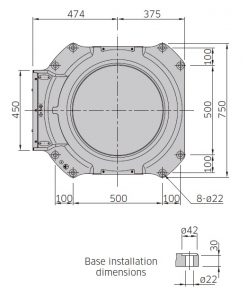
| Mounting | Floor | ||
| Installation Environment | Ambient Temperature (°C) | 0 – 45 | |
| Relative Humidity (%) | 35 – 85 (No dew, nor frost allowed) | ||
| Controller / Power Requirements (kVA) | E03 / 12 | ||
Reviews
There are no reviews yet.
Related products

Đại diện hãng

Cánh tay robot gắp sản phẩm
Bộ chia nguồn
6,000,000₫


Đại diện hãng

Cánh tay robot gắp sản phẩm
Sale!


Đại diện hãng

Cánh tay robot gắp sản phẩm
Be the first to review “CP500L Robot”